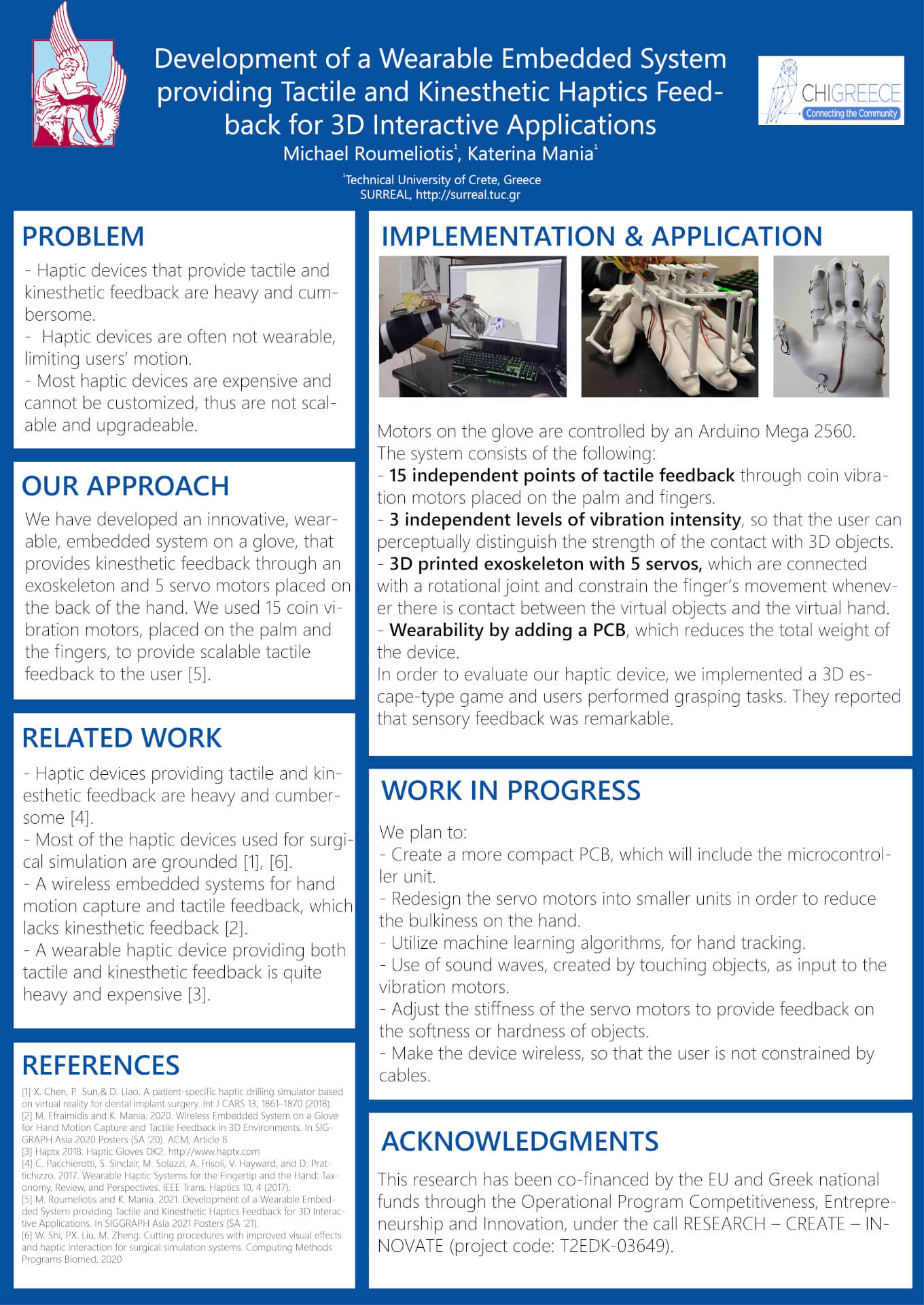
Existing haptic interfaces providing both tactile and kinesthetic feedback for virtual object manipulation are still bulky, expensive, and often grounded, limiting users’ motion. We have developed a wearable, lightweight, and affordable embedded system on a glove aiming to provide both tactile and kinesthetic feedback in 3D applications such as medical training, teleoperation, cultural heritage. We created a PCB for the circuitry and used inexpensive components. The kinesthetic feedback is provided to the user’s hand through a 3D-printed exoskeleton and five servo motors placed on the back of the glove. Tactile feedback is provided through fifteen coin vibration motors, placed in the inner side of the hand vibrating at three levels. The system is scalable and upgradable. In order to evaluate our haptic device, we implemented a 3D escape-type game and users performed grasping tasks. Users reported that sensory feedback was remarkable. We now work towards decreasing the size and weight of the device by redesigning the exoskeleton with lighter and fewer components. A new system, utilizing machine learning algorithms, will track the position of the hand and the bending of the fingers. Technologies providing tactile feedback are explored as vibration motors are limited only to vibration sensations excluding richer haptic interactions. The stiffness of the servo motors is adjusted providing feedback on the softness or hardness of objects with minimum latency and the highest possible refresh rate. The new, work-in-progress device is wireless so that the user is not constrained by cables. We will test this device in diverse scenes in application areas including cultural heritage.
Javascript must be enabled to continue!
Development of a Wearable Embedded System providing Tactile and Kinesthetic Haptics Feedback for 3D Interactive Applications
CHI Greece
Connecting the Community